

我科研团队在多机器人协同领域取得重要进展
2025-10-17 11:43:38 来源:科技日报

记者10月17日从哈尔滨工业大学(深圳)获悉,该校智能学部智能科学与工程学院梅杰教授团队通过融合机器人间的角度测量与自位移测量信息,在强噪声环境下实现了高精度的多机器人相对定位。相关研究成果日前发表在《国际机器人研究杂志》上。
相对位姿信息是多机器人协同作业的核心基础,例如无人机编队飞行中,无人机需实时感知邻近无人机的空间位置以维持特定队形。然而传统算法受限于测量噪声干扰,在精度与实时性间难以权衡。
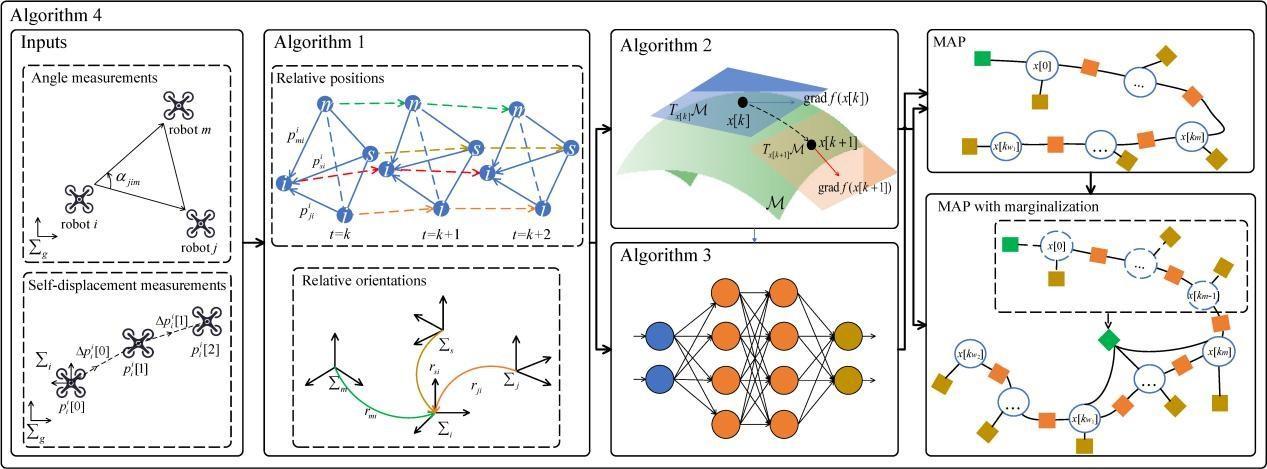
算法总体框图。科研团队供图
针对这一难题,科研团队基于机器人之间的角度测量与机器人自身的位移测量,创新性地提出一种线性相对定位算法。该算法极大地降低了定位所需的计算量。
同时,针对噪声环境下带来的定位精度瓶颈,科研团队将时间窗口内协同定位问题转化为最大后验估计(MAP),并结合线性相对定位算法,解决了求解MAP时的初始值估计问题与先验概率密度估计问题。
其中,在解决初始值估计问题时,科研团队将线性相对定位算法中线性计算过程重构为流形上加权总体最小二乘问题,并将此估计结果作为求解MAP问题的初始值。
据悉,先验概率密度估计问题即初始时刻机器人之间相对位姿的估计和置信度问题。科研团队巧妙地在线性相对定位算法的基础上设计神经网络概率密度估计器以学习初始时刻的相对位姿先验分布,突破了传统方法无法估计高维先验概率密度的问题。
此后,科研团队引入边缘化机制,以避免求解MAP问题时维度爆炸问题,并通过仿真和无人机集群实物实验,验证了所提出算法的有效性。








